Motor Driver Experimentation
Today I experimented with connecting a motor driver to the Arduino. Here’s the circuit I used:
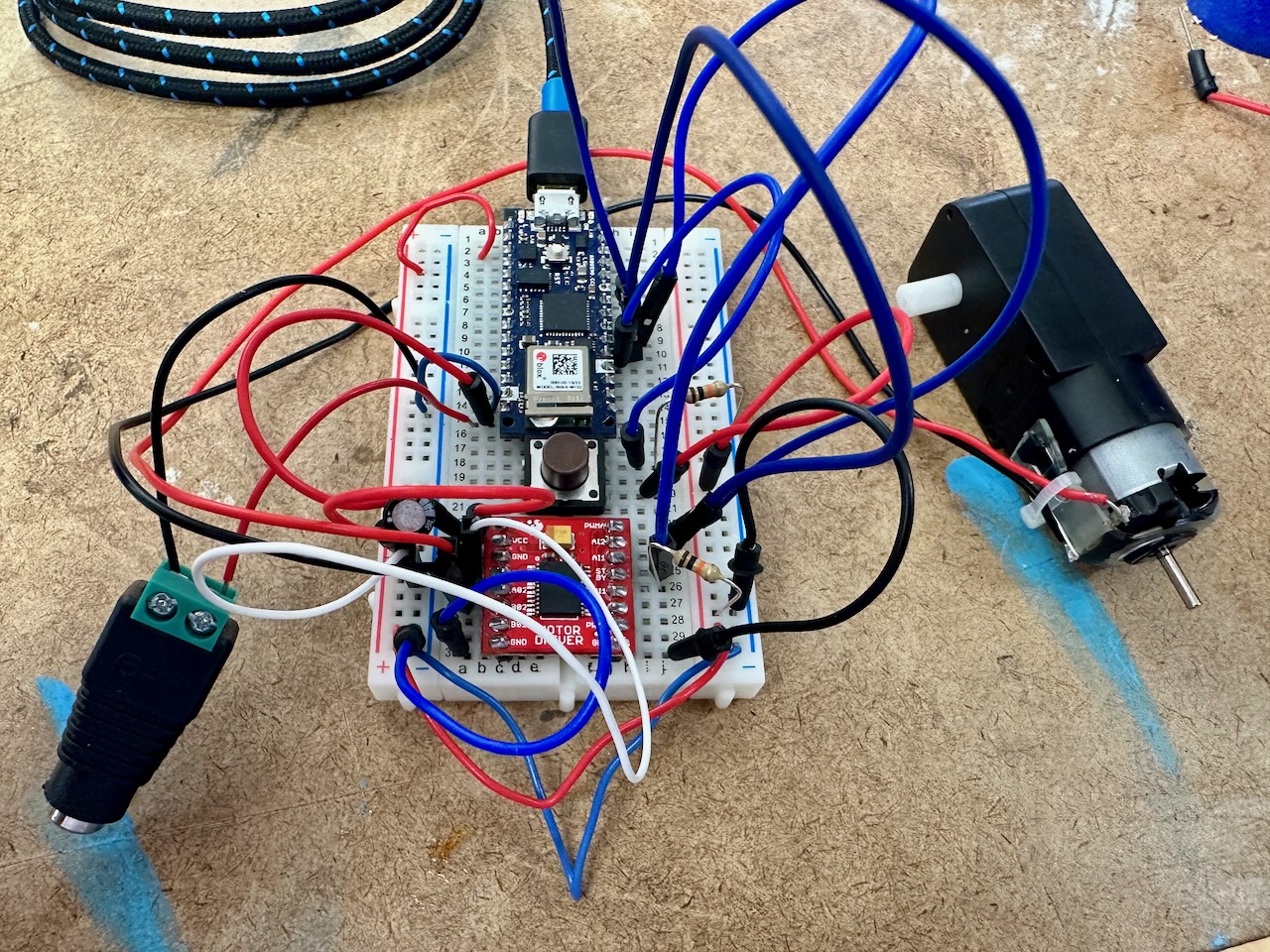
While initially I had the motor turn on only when the button is depressed, I switched it to be on all the time, changing directions & speed using PWM when the button is pressed.
Code for this demo:
const int switchPin = 2; // switch inputconst int motor1Pin = 3; // Motor driver leg 1 (pin 3, AIN1)const int motor2Pin = 4; // Motor driver leg 2 (pin 4, AIN2)const int pwmPin = 5; // Motor driver PWM pinvoid setup() {// set the switch as an input:pinMode(switchPin, INPUT);// set all the other pins you're using as outputs:pinMode(motor1Pin, OUTPUT);pinMode(motor2Pin, OUTPUT);pinMode(pwmPin, OUTPUT);// set PWM enable pin high so that motor can turn on:digitalWrite(pwmPin, HIGH);}void loop() {// if the switch is depressed, motor will turn on one direction slowly:if (digitalRead(switchPin) == LOW) {analogWrite(pwmPin, 72);digitalWrite(motor1Pin, LOW); // set leg 1 of the motor driver lowdigitalWrite(motor2Pin, HIGH); // set leg 2 of the motor driver high}// if the switch is low, motor will turn in the other direction quickly:else {analogWrite(pwmPin, 255);digitalWrite(motor1Pin, HIGH); // set leg 1 of the motor driver highdigitalWrite(motor2Pin, LOW); // set leg 2 of the motor driver low}}
For an extra challenge, I wanted to add a potentiometer to control the speed, leaving the button to control direction. Reviewing how I wired/coded a potentiometer week 2, Sophie-Ana and I configured that:
Code for this demo:
const int switchPin = 2; // switch inputconst int motor1Pin = 3; // Motor driver leg 1 (pin 3, AIN1)const int motor2Pin = 4; // Motor driver leg 2 (pin 4, AIN2)const int pwmPin = 5; // Motor driver PWM pinint dialValue = 0; // Current value from potvoid setup() {// set the switch as an input:pinMode(switchPin, INPUT);// set all the other pins you're using as outputs:pinMode(motor1Pin, OUTPUT);pinMode(motor2Pin, OUTPUT);pinMode(pwmPin, OUTPUT);// set PWM enable pin high so that motor can turn on:digitalWrite(pwmPin, HIGH);}void loop() {dialValue = analogRead(A0);analogWrite(pwmPin, 255 - (dialValue / 4));// if the switch is depressed, motor will turn in one direction:if (digitalRead(switchPin) == LOW) {analogWrite(pwmPin, 72);digitalWrite(motor1Pin, LOW); // set leg 1 of the motor driver lowdigitalWrite(motor2Pin, HIGH); // set leg 2 of the motor driver high}// if the switch is low, motor will turn in the other direction:else {digitalWrite(motor1Pin, HIGH); // set leg 1 of the motor driver highdigitalWrite(motor2Pin, LOW); // set leg 2 of the motor driver low}}